6 Remotely operated tools
6.1 General
ROT are tool systems either actuated from the surface (with ROV for backup functions) or operated by ROV. They are preferred to free-flying ROVs when high lifting or pulling capacities are required.
ROT are generally used for the following subsea tasks:
To perform the replacement or installation of components
To install and connect flowlines and umbilicals
ROTs are deployed and lowered by means of LARS, lift wires and umbilical with either dedicated thrusters or ROV assistance for lateral guidance (guideline method is excluded for deepwater applications).
Interfaces of ROT remain the same as the interfaces defined in Section Chapter 3, Interface requirement for ROV systems.
6.2 Component Change-Out tools
The Component Change-Out tool is mechanical ROV Operated Tool designed to recover and re-install subsea modules such as:
Subsea Control Module
Subsea Router Module
Manifold Control Module
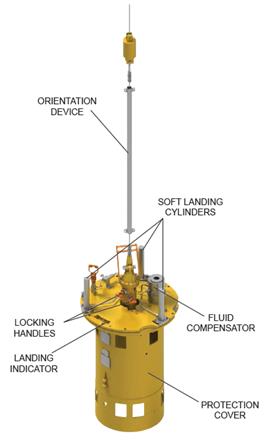
An example of CCO can be the FMC Module Replacement Tool (MRT). The MRT is a ROV operated tool deployed by means of lift wire; an orientation device provides attachment point to ROV manipulator and allows the ROV to guide and perform rough alignment. The launching of the MRT is similar to a ROV launching (i.e. by means of LARS). Connection and disconnection of modules is carried out using an ROV operated torque tool. Its main characteristics are:
Weight in air:1200kg (depending on the configuration)
Dimensions:1m x 1m x 2.2m in transport mode (LxWxH)
6.3 Pull-in and connection tools
Pull-in and connection ROTs for pipeline, flexible pipe and umbilicals are further detailed in referenced document [7] "Tie-in methods", part of TOTAL Offshore Reference Book.
Basically, the ROT systems can be either two tools deployed independently, one for initial pull-in operation and one for the connection phase, or one single tool combining both tie-in sequences.
The historical evolution of the tie-in tool technology is as follows:
The first generation was composed by two-ROT system (one pull-in tool and one connection tool)
Single tool ROT, combining both functions of pulling and connecting, were designed as an evolution of above technique
ROV-mounted tools (by means of tool skid, see Section 6) represent the latest improvement for deep to ultra deep water depths. Two main kind of connectors are Nowadays in use : Vertical Connection System (VCS) and Horizontal Connection Systems (HCS)
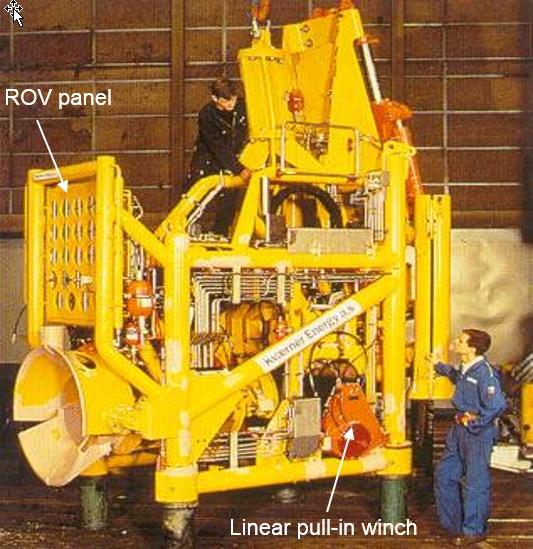
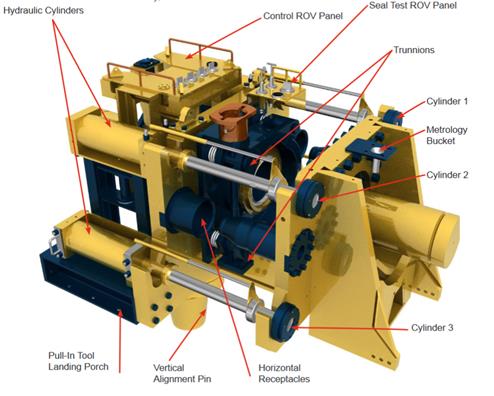
These tools include all necessary functions to perform their task; ROV is only used to help during their deployment (i.e. to guide the ROT to the connection location and align it), to attach the pull-in cable at the flowline extremity and eventually to activate back-up functions. ROT(s) (one single or two tools for a tie-in operation) particularly include:
Guiding device (e.g. funnel) to perform rough alignment of the outboard hub during the pull-in sequence
Either a subsea winch or a linear winch (with pull-cable stored at surface), to perform the pull-in operation
Dedicated tools to retrieve protection cap and clean the hubs
Connector and seal-plate
Dedicated tools to perform the connection (i.e. positioning of the connector, tightening of screw in case of a clamp connector or hydraulic activation in case of a collet connector, etc.)
Seal testing system
The maximum design operating depth of tie-in ROTs is about 500m. This is for practical reasons related to the encumbrance of lifting wire and umbilical deployment from the surface support vessel.
Oceaneering Diverless Connection System utilizes the GRAYLOC® Remote Clamp Connector for fast and reliable pipeline and flowline tie-ins in water depths beyond divers’ capabilities. The system relies on a ROV operated three segment clamp connector to make the connection between the two hubs (female and male), capturing a patented Grayloc® metal seal ring in between.
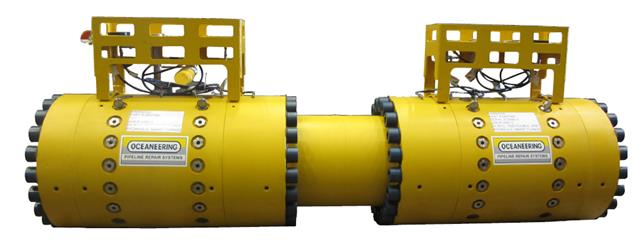
Other Remote operated tools concerns Pipe repair systems such as mechanical repair clamps or full coupling connectors for deepwater application. Oceaneering Hydraulic Double Grip and Seal Connector is designed to provide a structural connection between the jumper pipe and an existing
pipeline subsea. When hydraulically actuated, it will structurally attach to and seal against both
pipe ends. The connector is capable of withstanding full pipeline axial, bending, and torsional loads while withstanding hydrostatic end loads from the pipeline. For its implementation , installation aids and tooling such as Pipe lift frames , alignment & support hardware, pipe preparation & cutting tools are required.